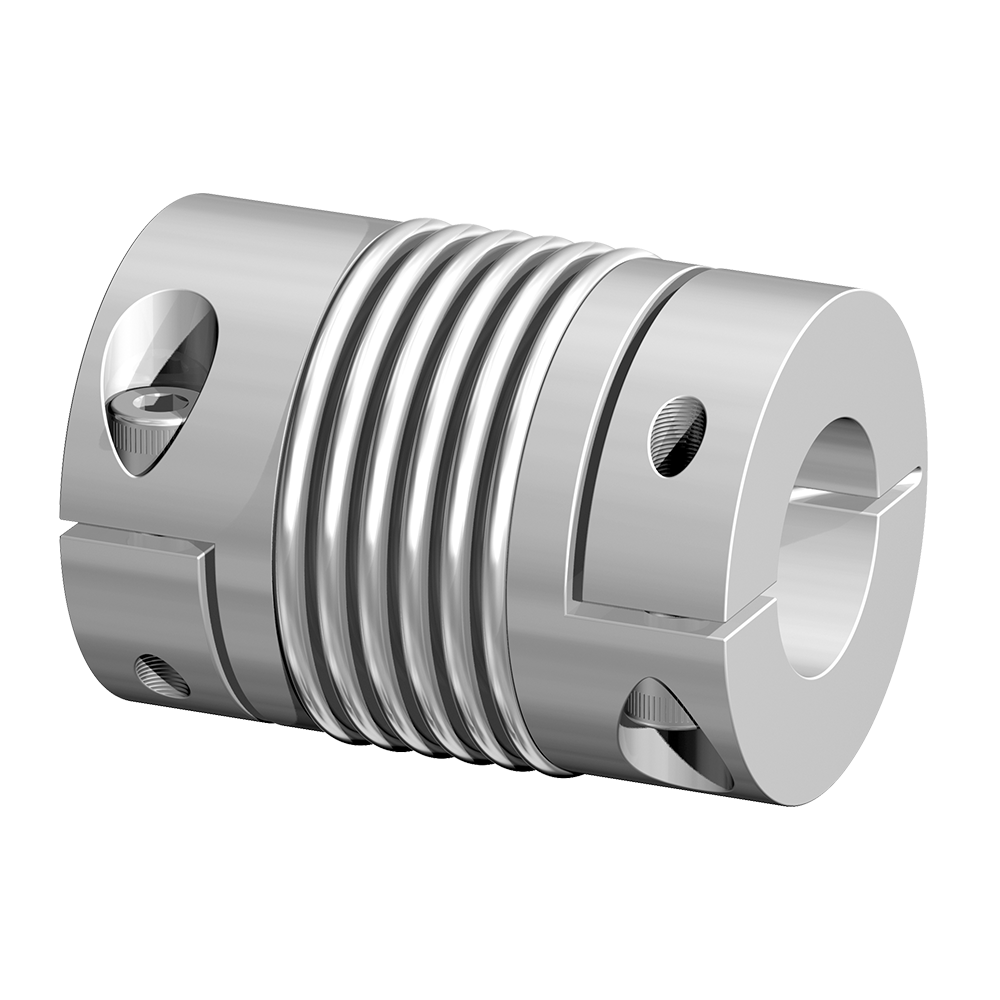
Metallbalgkupplungen GWB AKD
Die Baureihe ‚AKD‘ ist die klassische Metallbalgkupplung für ein breites Feld von Anwendungen. Eine spielfreie Übertragung des Drehmoments, hohe Torsionssteife und ein sehr guter Ausgleich von radialem, axialem und winkligem Wellenversatz gehören zu den Kernmerkmalen des Elements. Auch die Betriebssicherheit und Montagefreundlichkeit der AKD überzeugen.